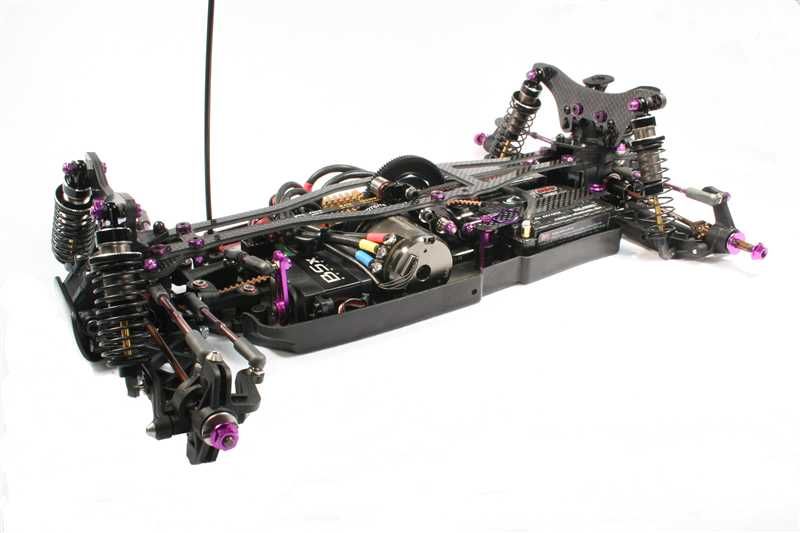
Schumacher hat nunmehr die elfte Generation ihrer 4 WD Offroad Fahrzeuge präsentiert.
Mehr infos auf:racing-cars.com/pp/Car_Showroom/CAT_K1.html#
Baubericht und weitere infos sobald ich sie habe.
MfG Ralf
Mehr infos auf:racing-cars.com/pp/Car_Showroom/CAT_K1.html#
Baubericht und weitere infos sobald ich sie habe.
MfG Ralf
Team CS-Electronic
Team Schumacher
Team Schumacher